Исполнитель Робот: что это, команды и как использовать на уроке
Робот — это учебный исполнитель на клетчатом поле. Ученики пишут на Python короткие программы: двигают Робота по клеткам, закрашивают их, проверяют стены и значения в клетках. Что получилось, сразу видно в окне исполнителя, а решение проверяется автоматически.
Статья адресована учителю информатики. В ней разобрано, что такое классический школьный Робот, как он устроен в варианте на Python, какие команды доступны ученику, как выглядят готовые программы и как вписать Робота в урок.
Коротко. Робот нужен не для робототехники и не для того, чтобы выучить Python. Это среда, где тренируют алгоритмическое мышление: умение заранее составить точный план и записать его так, чтобы по нему могла работать машина.
Зачем на уроке нужен именно Робот
У школьного курса информатики бывают разные задачи: научить работать с офисными программами, познакомить с синтаксисом языка программирования, показать устройство компьютера. В классической отечественной методике с учебными исполнителями цель другая. Здесь развивают алгоритмический стиль мышления и рассматривают его как самостоятельную ценность.
Этот стиль нужен там, где человеку приходится продумать все шаги заранее, а не решать по ходу. Нужно записать план без двусмысленностей, без «и так далее», «примерно» и «если что-то пойдёт не так». И нужно описать действия на формальном языке, понятном исполнителю, который ни о чём не догадывается сам.
Робот придумывался для того, чтобы трудности в задачах были алгоритмическими, а не техническими. В классическом курсе убирают лишнюю математику и технические подробности. У ученика остаются здравый смысл, клетчатое поле и небольшой набор команд.
Компьютер и язык программирования здесь, по сути, такие же средства, как ручка в математике. С удобным средством успеваешь решить больше задач. С неудобным урок уходит на «починку ручки». Модуль Робот сделан так, чтобы почти не отвлекать от алгоритма.
Что такое исполнитель Робот
Учебная модель, а не настоящий робот
В методике школьного курса Робота описывают так: есть клетчатое поле, между клетками могут стоять стены. В одной из клеток находится Робот, условная машинка с пультом управления. На пульте есть кнопки движения вверх, вниз, влево и вправо.
Образно его представляют как радиоуправляемую машинку с антенной, моторами и присосками. Пока «Робота в металле» нет, учитель может сам сыграть исполнителя у доски: ученик диктует команды, учитель их выполняет.
Важно помнить, что Робот — исполнитель, а не программист. Он не видит алгоритм целиком, не знает циклов и условий. Он только выполняет отдельные команды и отвечает на вопросы об обстановке: есть ли стена, закрашена ли клетка, какое в ней число. Программу читает и выполняет компьютер.
Две схемы управления
На первых занятиях полезно всё время сопоставлять два способа работы с исполнителем.
При непосредственном управлении человек смотрит на поле, нажимает кнопку, видит результат и решает, что нажать дальше. План рождается по ходу. Даже слабый ученик легко обведёт препятствие на доске, если видит Робота.
При программном управлении человек записывает алгоритм заранее, а дальше компьютер выполняет его без автора: отправляет команды исполнителю, получает ответы и принимает решения по правилам, заданным программой.
Переход от первого способа ко второму и есть тренировка алгоритмического мышления. Сделать самому легко, а записать так, чтобы сработало для любой обстановки из задачи, уже трудно.
Откуда взялся школьный Робот
Модель сложилась на рубеже 1970-х и 1980-х. В МГУ для первого занятия по программированию придумали исполнителя Путник — с ориентацией, шагом вперёд и поворотами. Для школы его упростили: движение вправо, влево, вверх и вниз, без понятия «направление». Когда же появились экраны, стены стали рисовать между клетками, а не занимать ими целую клетку.
Похожие идеи возникали и в других странах — например, Karel the Robot в США. Замысел везде один: исполнитель на клетчатом поле и задачи, не требующие математических знаний. Это естественный первый шаг к алгоритмизации.
Такой Робот стал частью отечественной школьной информатики и вошёл в среду КуМир. Вариант на Python сохраняет ту же учебную модель, только программы пишутся на Python, а не на школьном алгоритмическом языке.
Как выглядит Робот
На экране открывается окно с клетчатым полем. В нём видны Робот в текущей клетке, стены между клетками и по краю поля, отмеченные клетки, которые нужно закрасить, и уже закрашенные. Тут же показано условие задачи и, если они есть, ограничения: лимит команд, требование использовать цикл и так далее. Внизу расположены кнопки Выполнить и Шаг.
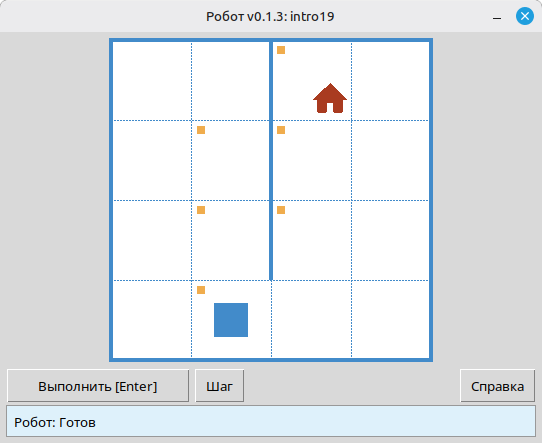
Окно Робота: поле, стены, условие задачи и результат запуска программы.
На уроке всё обычно идёт так:
- Ученик создаёт файл
.pyс вызовомtask("intro1")(или другой задачи из каталога) и командами Робота. - Запускает программу — открывается окно с первой обстановкой.
- Робот выполняет команды; в пошаговом режиме виден каждый шаг.
- Если результат не совпал с требуемым состоянием, отображается соответствующее сообщение, и ученик правит программу.
- Во многих задачах несколько обстановок, и одна программа должна пройти все варианты поля.
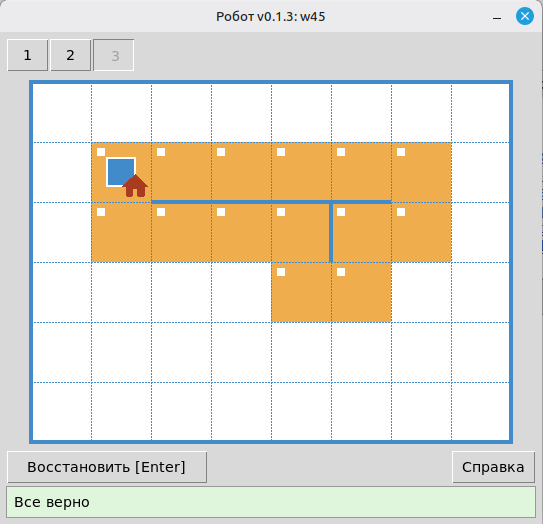
Все обстановки задачи пройдены — одна программа сработала для каждого варианта поля.
Для учителя есть средство просмотра задач. Из распакованного архива с GitHub Releases запустите python viewer/viewer.py. Можно открыть каталог, выбрать тему и номер, показать условие и все обстановки на проекторе, причём без запуска ученического решения.
Что умеет Робот (и чего не умеет)
Робот умеет:
- сдвинуться на одну клетку в одном из четырёх направлений;
- закрасить текущую клетку;
- сообщить, есть ли стена в заданном направлении и закрашена ли текущая клетка;
- вернуть число — уровень «загрязнения» в текущей клетке (это аналог задач про радиацию или температуру в классическом курсе);
- вывести число в текущей клетке (команда
printn).
Чего Робот не умеет, и это методически важно:
- ходить на несколько клеток одной командой («вправо на 5»);
- поворачиваться, как черепашка;
- сам решать, какую команду выполнить следующей: за это отвечает программа на Python;
- «понимать» циклы, условия и функции — их выполняет Python, а Робот лишь откликается на элементарные команды.
Поэтому в задачах и появляются циклы и условия: чтобы повторить простой шаг или выбрать действие по ответу Робота.
Система команд
В классическом курсе набор команд у Робота фиксирован: движение, закраска, вопросы о стенах и клетке, «температура» и «радиация». Допридумывать команды по ходу нельзя — иначе на уроке теряется общая договорённость. В модуле те же смысловые группы выражены функциями. Полный список — в справочнике команд.
Запуск задачи или свободного поля
| Команда | Назначение |
|---|---|
task("имя") |
Открыть задание из встроенного набора (например, task("intro1")). |
field(width=8, height=6) |
Открыть пустое поле заданного размера без файла задачи. Старт — левый верхний угол, цель — правый нижний; успех проверяется так же, как в задаче. |
Обычно в начале файла пишут:
from robot import *
Можно импортировать только нужные имена, но на первых занятиях короткая запись удобнее.
Движение (4 команды)
| Команда | Действие |
|---|---|
move_right() |
На одну клетку вправо |
move_left() |
На одну клетку влево |
move_up() |
На одну клетку вверх |
move_down() |
На одну клетку вниз |
Команды вызываются без аргументов: один вызов — один шаг. Если шаг невозможен (стена или край поля), программа завершается с ошибкой. Это тоже часть обучения.
Действие с клеткой
| Команда | Действие |
|---|---|
paint() |
Закрасить текущую клетку |
Обратная связь: стены
Для каждого направления есть пара вопросов — «свободно?» и «стена?». С двумя формами проще писать условия, не прибегая к отрицанию слишком рано.
| Свободный проход | Стена |
|---|---|
is_free_left() |
is_wall_left() |
is_free_right() |
is_wall_right() |
is_free_up() |
is_wall_up() |
is_free_down() |
is_wall_down() |
Функции возвращают True или False.
Обратная связь: закраска
| Команда | Возвращает True, если… |
|---|---|
is_cell_painted() |
текущая клетка закрашена |
is_cell_not_painted() |
текущая клетка не закрашена |
Числовая обратная связь и вывод
| Команда | Назначение |
|---|---|
pol() |
Уровень загрязнения в текущей клетке (целое число) |
printn(value) |
Вывести целое число в текущей клетке |
С этими командами появляются задачи посложнее, например поиск минимума на поле и вывод результатов, и всё это на той же модели поля.
Почему нет команды «вправо на n»
Ученики часто спрашивают: есть move_right(), почему нет move_right(n)? За этим стоит вопрос поважнее. Как объяснить, что для действия, которое кажется естественным, например «пройти пять клеток вправо», нужно написать целый алгоритм?
В классической методике Робот выступает как внешний исполнитель, существующий отдельно от программы. Такой исполнитель умеет только элементарные операции: один шаг и один вопрос об обстановке. Любая «умная» команда с параметром усложняет самого Робота. Это больше механизмов и больше затрат на устройство. Но Роботом всё равно управляет компьютер, и он без труда выполнит цикл «n раз сделать шаг вправо». Усложнять исполнителя ради того, что программа и так умеет повторить, незачем. Поэтому связка «простой Робот плюс программа с циклом» выгоднее, чем «сложный Робот плюс та же программа».
К тому же «естественное» действие зависит от задачи. На одних полях удобны шаги в четыре стороны, на других нужен ход «конём» по клеткам. Если подстраивать Робота под каждый класс задач, исполнителя пришлось бы постоянно переделывать. Связка «компьютер плюс Робот с простейшими командами» работает наоборот: под новый класс задач настраивается не Робот, а алгоритм, с помощью цикла, условия или своей функции. Поэтому повторение шага записывают в программе, а не добавляют новую кнопку на пульт.
Примеры программ
Задачи intro1, intro8 и w2 можно открыть в каталоге задач.
Пример 1. Линейная программа — первые шаги
Задача: дойти из начальной клетки до цели, без условий и циклов.
from robot import *
task("intro1")
move_right()

Даже такая короткая программа приучает к форме записи.
Пример 2. Закрашивание клеток
Задача: дойти до отмеченных клеток и закрасить их — типичная задача из темы «Первые шаги» (intro8).
from robot import *
task("intro8")
move_down()
paint()
move_right()
paint()
move_up()
paint()
move_right()
paint()
move_down()
Здесь уже видна последовательность команд как алгоритм.
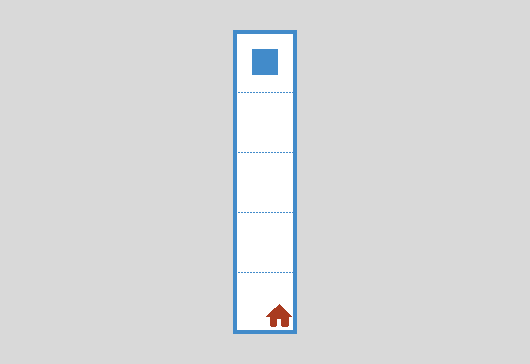
Пример 3. Обратная связь и цикл «пока свободно»
В задаче w2 узкий вертикальный коридор. Робот стоит наверху, цель отмечена на клетке прямо над нижней границей поля. Обстановки две, и они разной высоты, поэтому число шагов вниз заранее неизвестно. Отсюда и классическая схема «пока снизу свободно» вместо длинной цепочки move_down().
В программе:
from robot import *
task("w2")
while is_free_down():
move_down()
В этом и состоит главное методическое отличие Робота от черепашки: обратная связь делает естественным появление «если» и «пока» ещё до переменных и выражений.
Робот и «черепашка»: в чём разница
| Черепашка | Робот | |
|---|---|---|
| Движение | Поворот, шаг с аргументом | Четыре направления, один шаг без аргументов |
| Обратная связь | По сути нет | Стены, закраска, числа в клетке |
| Типичные конструкции | Последовательность, функции | Последовательность, if, while, функции |
| Как усложнять | Часто через геометрию и углы | Через обстановку на поле и логику |
Полезны обе модели, но в курсе у них разные роли.
Как использовать Робота на уроке
Доска, без компьютера
- Нарисуйте поле и препятствие. Поставьте «Робота».
- Попросите ученика командовать: «вниз», «вправо»… Вы выполняете команды.
Это не лишняя игра. Так проще объяснить связку «компьютер и исполнитель».
Первые программы на компьютере
- Скачайте архив с GitHub Releases и распакуйте в рабочую папку.
- Начните с
sample_solution.pyи задачиintro1. - Дайте серию задач темы «Первые шаги», от
intro1доintro24, в своём темпе и с автопроверкой.
Требования: Python 3.7+ и стандартная библиотека. Для окна Робота нужен tkinter (в настольной установке Python он обычно уже есть).
Подготовка урока учителем
- Откройте средство просмотра задач: выберите тему, прочитайте условие, пролистайте обстановки.
- Посмотрите на ограничения в задаче — лимит операторов, обязательный вызов функции, запрет лишних конструкций. Они подталкивают ученика к той идее, ради которой задуман урок.
- Сложные ошибки разбирайте по шагам в окне Робота на проекторе.
Сколько времени «гонять Робота»
В начале курса информатики на исполнителей, Робота, Черепаху и их аналоги, уходит много времени. Потом акцент смещается на конструкции языка и более общие задачи. Робот не исчерпывает весь курс, но даёт надёжную опору для первых алгоритмов. Понятия, которые на нём вводятся, алгоритм, цикл, ветвление, функция, граница между программой и исполнителем, остаются с учеником и дальше. Ощущение «игрушки» на первых порах нормально. Важно, чтобы задачи росли по алгоритмической сложности, а не превращались в одно и то же.
Частые вопросы
Чем этот Робот отличается от КуМира?
Модель поля и методика те же, что у классического школьного Робота. Разница в языке записи: программы пишутся на Python, а не на школьном алгоритмическом языке.
Нужен ли интернет?
Нет. После скачивания и распаковки архива модуль и задачи работают локально.
Можно ли проводить урок без компьютера?
Да. Алгоритмическое мышление не требует компьютера на каждом занятии. Доска и ролевая игра «ученик, компьютер, Робот» тоже полноценная часть курса. Компьютер ускоряет проверку и даёт каждому ученику свой темп.
С какого возраста подходит?
Поле и четыре направления можно объяснить очень рано — в методике упоминают и младших школьников. Записывать алгоритмы для компьютера обычно удобно с 5–7 класса.
Это замена урокам программирования на Python?
Скорее это смена фокуса: на алгоритмы, а не на язык ради языка. Синтаксиса Python здесь минимум. Цель в другом: научить думать и записывать алгоритмы. Набор команд небольшой, а сложность не в командах, а в самой задаче.
Где взять задачи и материалы?
- Каталог задач на сайте — условия, картинки полей, темы.
- Справочник команд.
- Скачать модуль и репозиторий на GitHub.
Статья опирается на классическую отечественную методику школьных исполнителей и описывает учебного исполнителя Робот на Python.